電網巡檢機器人的應用在現代電網管理中顯得尤為重要。電網巡檢機器人能夠在顯著提升巡檢效率、減少人工巡檢的煩瑣與耗時的同時,保障巡檢質量,通過精準的數據采集和處理,降低漏檢和誤檢率。此外,該機器人還能有效應對復雜環境,減少安全風險。電網巡檢機器人能夠實現智能分析,提供數據支持決策,優化電網運行。因此,關于電網巡檢機器人的研究具有較好的經濟效益與廣闊的應用前景,是當前的研究熱點。
本文對巡檢機器人變形底盤傳動齒輪部分進行有限元分析。首先,在Solidworks中完成對變形底盤部分模型的建立;其次,將其導入ANSYS Workbench有限元分析軟件中,對傳動齒輪進行靜力學分析,獲得齒輪在靜力作用下的應力分布、位移變形等重要數據。為了驗證有限元分析結果的準確性,本文還將分析得到的數據與赫茲接觸理論的計算結果進行比對,通過這種綜合應用理論計算與有限元分析的方法,全面、準確地評估齒輪的性能。
1、巡檢機器人底盤部分的三維模型
由于巡檢作業場景的多樣化與工作環境的局限性,巡檢機器人采用可以伸縮的變形底盤,其部分三維模型如圖1 所示。底盤的變形主要依賴電機驅動的雙向絲桿旋轉機制。
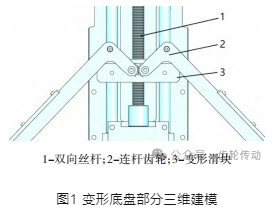
當電機啟動時,它會驅動絲桿進行旋轉,絲桿的旋轉進而帶動滑塊在絲桿上前后滑動,這種滑動運動帶動連桿齒輪發生轉動,最終轉化為底盤的變形動作,實現了底盤的靈活調整與變換。
2、齒輪參數和赫茲接觸理論分析
齒輪參數設計
在本次分析過程中,兩個異形齒輪齒數為 Z=19(實際為7),齒輪的材料為AISI 304不銹鋼,具體的材料參數如表1所示。

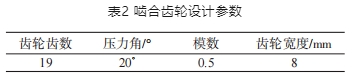
齒輪設計參數如表2所示。
赫茲接觸理論分析
赫茲接觸方程由德國物理學家海因里希·魯道夫·赫茲在1882年首次提出,在這一理論中,深入探討了彈性體在接觸狀態下的相互作用。接觸疲勞強度計算公式σH如下。
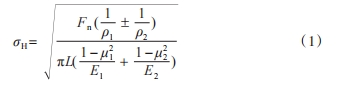
式(1)中:σH為接觸應力;Fn為法向力;±為接觸類型,正號表示正接觸,負號表示負接觸;μ1、μ2為兩種材料的泊松比。
ρε 為綜合曲率半徑,且 ρε = ρ1 ρ2 /(ρ1 ± ρ2 );ZE 為材料彈性系數,![]()
把 ρε 和 ZE代入式(1)中,得到簡化的接觸疲勞強度計算公式σH:
鑒于齒輪在節點處所受的力和沖擊振動顯著增大,為簡化計算過程,可以將赫茲接觸方程特定地應用于齒輪節點處的許用應力計算。在進行這種簡化時,需要特別考慮以下幾個關鍵因素:材料的彈性系數ZE、節點區域系數 ZH與齒輪嚙合的重合度系數 Zε。故將復雜的赫茲接觸方程簡化為一個特定于齒輪節點處的許用應力計算公式,從而更加高效地進行齒輪強度的評估和分析。按照上述簡化,可得:
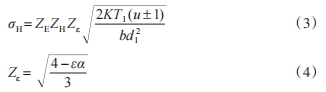
在式(3)和式(4)中:T1為小齒輪所承受的轉矩;u 為傳動比,由于兩個齒輪完全相同,則u = 1;d1為小齒輪的分度圓直徑,此處,d1=9.5 mm;b為齒輪的寬度,其數值為8 mm。
由于齒輪為標準安裝,壓力角為20° ,通過查閱相關資料,得知材料彈性系數 ZE=188,節點區域系數 ZH=2.3,通過查表,得重合度系數Zε=1.1。假設齒輪承受的最大轉矩T1=1 000 N·mm,將上述參數帶入式(3)中,可得σH=260.37 MPa,從而得到理論最大接觸應力為260.37 MPa。
3、嚙合齒輪的有限元靜力學分析
模型的簡化
鑒于齒輪失效的主要形式為齒面接觸和齒根斷裂,齒面和齒根區域為齒輪中最薄弱且最易受損的重要部分,因此,在進行有限元分析時,這兩個關鍵位置必須保留原始設計細節,以確保分析結果的準確性。故將嚙合齒輪的三維模型直接導入有限元分析軟件中,確保齒面和齒根區域的特征得以完整地保留和模擬,這樣可以確保對齒輪性能進行全面且準確的評估。
網格劃分
在對齒輪模型進行有限元分析的網格劃分階段,通常有兩種主要類型的網格可供選擇:四面體網格和六面體網格。雖然六面體網格可能在理論上提供更高的計算精度,但在實際應用中,四面體網格在結構簡化方面的要求較低,且其劃分過程更為高效,因此,選擇使用四面體網格進行劃分。在劃分時,鑒于嚙合接觸的位置對應力分析和接觸力計算至關重要,故對接觸區域進行單獨的網格加密。具體而言,整體模型的網格精度設定為2 mm,嚙合接觸區域的網格精度則細化至1 mm,以確保該區域的計算準確性。網格劃分的結果如圖2所示。
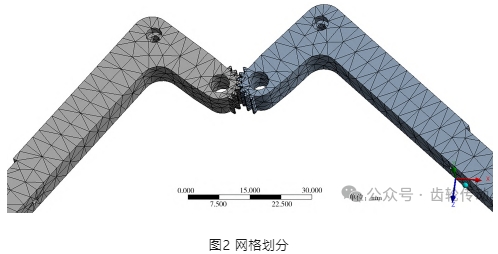
使用四面體網格劃分節點數為29 680,單元數目為16 660。
添加邊界和約束條件
施加載荷以模擬實際工作過程中的受力情況。設定左側異形齒輪為主動輪,首先給右側齒輪添加固定副,設定左側齒輪為旋轉副并且施加轉矩T1=1 000 N·mm。另外,設置二者接觸類型為摩擦接觸,摩擦系數為0.1。
求解結果分析
在完成以上步驟后,求解,得到嚙合齒輪變形云圖、應變云圖,如圖3、圖4所示。
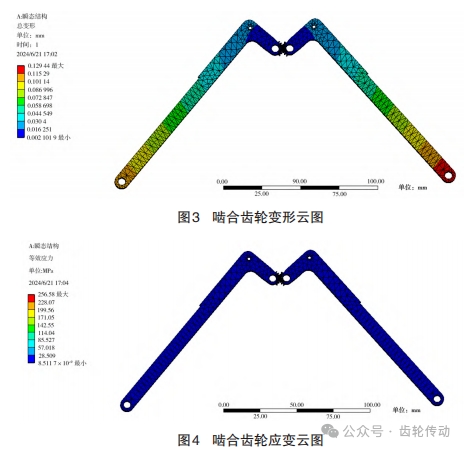
通過分析上述的應力應變云圖,發現嚙合齒輪在最大載荷下產生的形變僅為0.13 mm,這顯示了該齒輪在工作過程中的形變量極小,從而確保了良好的傳動性能。從分析結果中看出,在1 000 N·mm的轉矩作用下,通過有限元分析得出的接觸應力σH=256.58 MPa,同時利用赫茲接觸理論進行的理論計算得到的接觸應力 σH=260.37 MPa。盡管兩個結果之間存在微小的差距,但考慮到赫茲接觸計算公式中參數選取的多樣性和復雜性,這種差距是可以接受的。
4、結論
(1)經過對嚙合齒輪的有限元靜力分析,得出齒根和齒面嚙合處為潛在的高應力區,這些區域容易發生失效。因此,在優化齒輪設計時,應重點關注齒根和齒面接觸等關鍵部位,以提高齒輪的可靠性和耐用性。
(2)在評估齒輪接觸應力時,傳統的赫茲接觸理論雖然精確,但其計算過程涉及眾多參數如重合度、載荷系數等,這不僅煩瑣而且容易出錯。相較之下,利用 ANSYS Workbench進行有限元分析能夠迅速且準確地計算出接觸應力,且與赫茲接觸理論的結果相近。因此,在效率和準確性方面,有限元分析校核相較于傳統赫茲接觸理論校核具有明顯的優勢。通過對嚙合齒輪進行有限元靜力分析,可以發現變形齒輪的強度和強度滿足使用要求。
參考文獻略.